- ERS
- Mission
- ERS Overview
ERS Overview
Mission Background
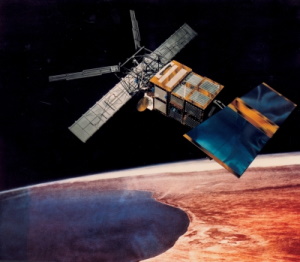
ERS was the European Space Agency's first Earth-observation satellite programme using a polar orbit. On a global scale, the two ERS satellites expanded our understanding of the interaction between the oceans and atmosphere, ocean currents and changes in the Arctic and Antarctic ice, giving climatologists more confidence in assessing climate trends. The ERS satellites also kept a close eye on agricultural areas, forests, coastlines and marine pollution. By detecting land-use changes, such as the destruction of tropical rain forests, ERS data helped governments around the world police a broad range of local and global environmental problems.
They were called upon to monitor natural disasters such as severe flooding or earthquakes in remote parts of the world. ERS-1's geodetic mission allowed for accurate mapping of the Earth's bathymetry and geoid over the seas using the Radar Altimeter.
ERS-2 carried on the work begun by its sister craft ERS-1, by being equipped with instruments measuring the ozone content of the atmosphere (the new GOME sensor) and monitoring changes in vegetation cover more effectively (an improved ATSR). Built like ERS-1 by a consortium led by Deutsche Aerospace, ERS-2 carried the same active radar instruments. The largest of these was the Active Microwave Instrument (AMI), which in SAR imaging mode generated detailed 100 x 100 km scenes over the oceans, polar regions, coastal zones and land. Length and direction of ocean waves were derived when operating in SAR wave mode, while the Wind Scatterometer ensured generation of sea surface wind speed and direction. The second active instrument was the Radar Altimeter (RA) which provided very precise measurements of the satellite's height above the ocean, ice and land surfaces.
Learn more about the ERS-1 and ERS-2 missions on ESA's eoPortal (The information provided is sourced and updated by external entities. For further details, please consult our Terms and Conditions page).
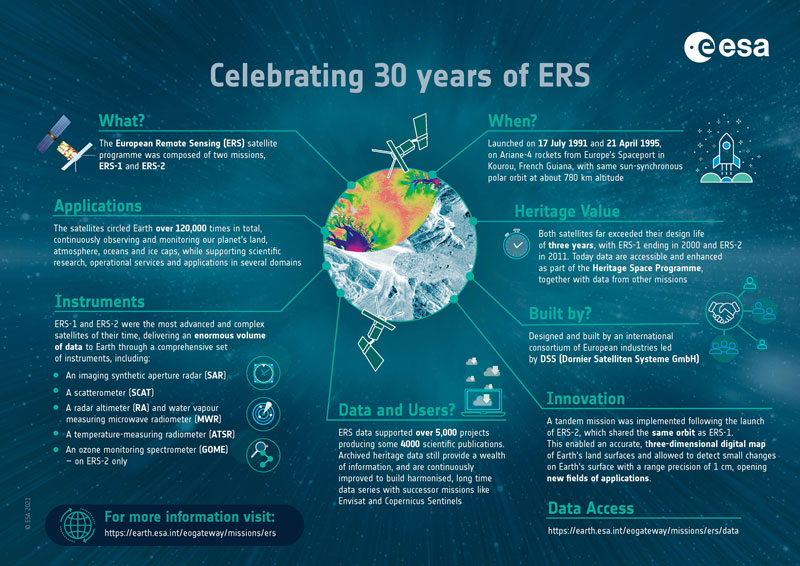
Infographic
Learn more about the ERS missions in this infographic:
Satellite Design
The ERS satellite concept was based on the re-utilisation of the Multi-mission Platform, developed within the French SPOT programme. This platform provided the major services for the satellite and payload operation, in particular attitude and orbit control, power supply, monitoring and control of payload status, telecommunications with the ground segment. To meet their mission objectives, both ERS satellites were placed in a near-polar orbit at a mean altitude of about 780 km with an instrument payload comprising active and passive microwave sensors and a thermal infra-red radiometer.
The ERS platforms consisted of:
- The Service Module carrying the house-keeping sub-systems, and interfaced with the propulsion module, payload, solar generator and the battery compartment
- The Propulsion Module
- The Solar Array Sub-Assembly of two 5.8 m x 2.4 m wings, on which were mounted a total of 22260 silicon solar cells supplying power greater than 2000 W
Following launch, the two wings deployed and the whole array rotated through 360°, with respect to the satellite, during each orbit to maintain Sun pointing. During the sunlit phase (66 minutes) of each orbit, the solar array provided electrical power to all of the on-board systems and charged the spacecraft's batteries.
The payloads consisted of a SAR (image and wave modes) a Wind Scatterometer (WS), a Radar Altimeter (RA), a Microwave Radiometer (MWR), an Along Track Scanning Radiometer (ATSR), Precise Range and Range-Rate Equipment (PRARE) and Laser Retro-Reflectors (LRR). ERS-2 had an extra spectrometer instrument, GOME, a passive instrument for global monitoring of the ozone content in the atmosphere.
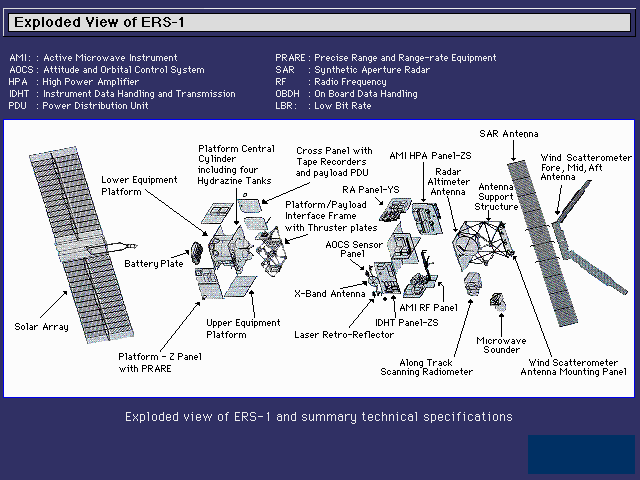
Payload Module

There were two main parts to the payload module: the Payload Electronics Module (PEM) and the Antenna Support Structure (ASS).
The PEM was an aluminium face-sheet/honeycomb structure supported by nine internal vertical titanium beams. The central beam lay at the intersection of two internal cross-walls, so that the PEM was effectively divided into four separate compartments. Each outer panel was dedicated to a particular instrument, to simplify integration logistics. The payload was separated from the platform by a non-load-bearing electromagnetic shield. An aluminium-honeycomb panel closed the opposite end of the structure, stabilising the beams and providing the interface to the ASS at the beam locations. These provided a load path from the ASS to the platform.
The ASS was composed of carbon-fibre-reinforced plastic (CFRP) tubes, with titanium at the high-load bearing structural elements. The lower part of the assembly consisted of five tripods, three support points for the SAR antenna\view and two intermediate support points for the upper assembly. A CFRP plate at the top, which carried the Scatterometer antennae, was supported by three further tripods attached to the intermediate points and the SAR central point. The Altimeter's antenna was attached at three node points by a triangulated strut system.
The payload module also contained a dedicated Instrument Data Handling and Transmission (IDHT) system, which permitted the SAR image mode data to be transmitted directly to the ground stations and the data from the LBR instruments to be transmitted to the ground in real-time or recorded on one of two on-board tape recorders. The tape recorders were designed to store a full orbit of LBR data on 3000 ft of 1/4-inch magnetic tape, leading to a total data recording capacity of 6.5 Gbit. The IDHT was located on the Earth-facing panel of the PEM, with the tape recorders mounted inside one of the cross-walls.
| Orbit Type | Near-circular, polar, Sun-synchronous |
| Altitude | 782 to 785 km |
| Inclination | 98.52° |
| Period | About 100 minutes |
| Orbits per day | 14.3 |
| Repeat cycle | 3-day, 35-day, 168-day (ERS-1) 3-day, 35-day (ERS-2) |
| Launch mass | 2384 kg (ERS-1) 2516 kg (ERS-2) |
| Payload peak power | <=2600 W |
| Payload permanent power | <=550 W |
| Power supply voltage | 23-37 V |
| On-board energy | 2650 WH max2 |
Mission Operations
To carry out its mission ERS was required to orbit so that its instruments could scan along predetermined paths designed to give optimum coverage for a set number of orbits. To achieve this, the satellites were three-axis-stabilised, Earth-pointing in yaw steering mode (YSM). The elliptical orbit was sun-synchronous, near polar, with a mean altitude of 785 km, an inclination of 98.5° and a local solar time at the descending node of 10:30 a.m.
The ERS satellites had a range of altitude sensors. The long-term reference in pitch and roll was obtained from an infra-red Earth sensor. The yaw reference was obtained once each orbit from a narrow field Sun sensor, which was aligned to view the Sun when the satellites were at a particular point in their orbit. The short term attitude and rate reference was obtained from three of six gyroscopes. Finally, there were two wide-field Sun-acquisition sensors for use in safe mode, when the satellite was Sun, rather than Earth, pointing. The primary means of attitude control was provided by a set of reaction wheels, which were nominally at rest. They could be spun in either direction, exchanging angular momentum with the satellite in the process. It was also possible, if there were permanent torques on the satellite due, for instance, to radiation pressure on the solar array, to bias one or more wheels to be nominally not at rest, but rotating at a defined speed. Monopropellant-type thrusters aligned about the spacecraft's three primary axes were used in different combinations to maintain and modify the satellite's orbit and to adjust its attitude during non-nominal operations.
ERS-2 Gyroscope system failures (2001)
Throughout it's lifetime, ERS-2 suffered several problems with some of the six gyroscopes leading to six different piloting modes in order to ensure the mission continuity.
In 2001, after the failure of several on-board gyro systems, a scheme for flying and controlling the ERS-2 mission without gyros was invented; the "gyro-less" yaw steering mode or the so called "Zero-Gyro Mode" (ZGM). The ERS-2 platform operations was performed in Zero-gyro-mode (ZGM) from June 2001 until March 2002. The Yaw Control Monitoring – Regional operations (YCM-R) piloting was then applied until end of the mission.
ERS-2 LBR Tape Recorder failure (2003)
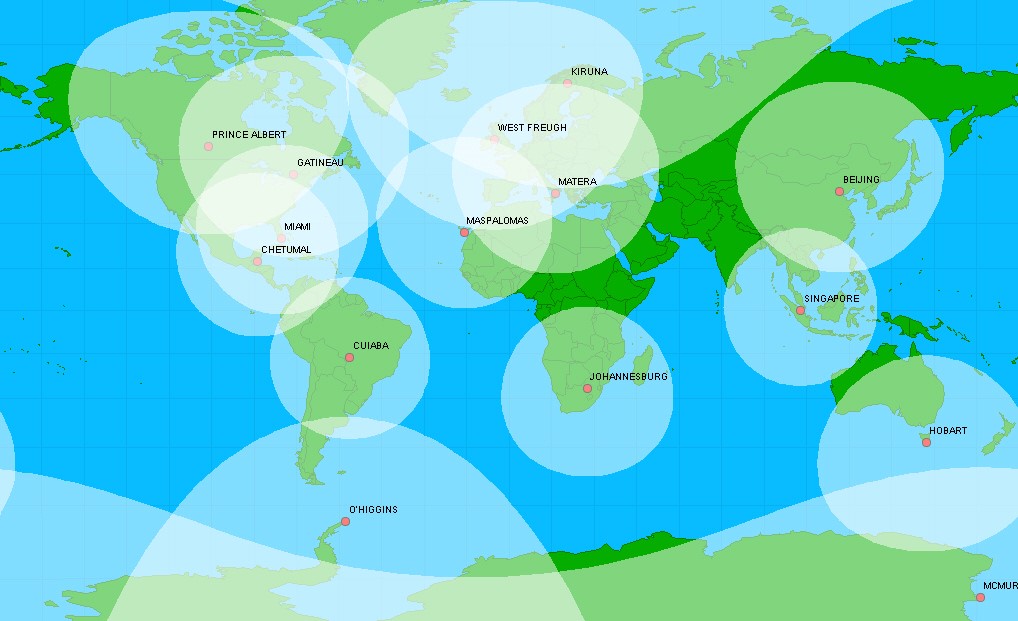
All ERS-2 Low Bit Rate (LBR) instruments were operated on a "global" basis until June 2003. Until then, the on-board recorders were used to record each orbit and the data (real time and playback) was dumped over a predefined set of ground stations (Kiruna-Samijarvi, Maspalomas, Gatineau and Prince Albert). However, on 22 June 2003, a failure in the on-board data storage system led to the mission being re-designed as "real time" only, with LBR data directly relayed to ground at the time of acquisition within the visibility of the ESA ground stations. In order to expand the LBR Near Real Time coverage after the loss of the on-board recorders, a number of additional National Foreign Stations (NFS) were deployed between 2003 and 2011 (end of mission).
| Station | Activation date |
|---|---|
| O'Higgins (Antarctica) | September 2003 |
| West Freugh (UK) | December 2003 |
| Matera (Italy) | March 2004 |
| Miami (US) | November 2004 |
| Beijing (China) | June 2005 |
| McMurdo (Antarctica) | July 2005 |
| Hobart (Tasmania) | December 2005 |
| Singapore | August 2006 |
| Chetumal (Mexico) | September 2007 |
| Johannesburg (South Africa) | May 2008 |
| Cuiaba (Brazil) | May 2011 |
ERS Mission Phases
Both ERS-1 and ERS-2 were operated in a 1-day difference (known as tandem mode) from 1995 to 2010 to develop SAR interferometry applications. ERS-2's track over the Earth's surface coincided exactly with that of ERS-1 passing 24h earlier. Learn more about the different phases and repeat cycle each mission followed:
| Phase | Phase Name | Phase Start | Phase Stop | Start Orbit | Stop Orbit | Repeat Cycle | Track Range | SAR Mission Objectives |
|---|---|---|---|---|---|---|---|---|
| Launch | 17/07/1991 | |||||||
| Payload switch-on and verification | 17/07/1991 | |||||||
| A | Commissioning Phase | 25/07/1991 20:52:34 | 10/12/1991 22:33:01 | 126 | 2104 | 3 days | 1-43 | SAR Commissioning |
| B | 1st Ice Phase | 28/12/1991 07:36:18 | 01/04/1992 04:48:52 | 2354 | 3713 | 3 days | 1-43 | Ice and pollution; interferometry possibility |
| R | Roll-tilt Phase | 02/04/1992 15:58:35 | 14/04/1992 06:17:59 | 3735 | 3900 | 35 days | 1-501 | Different SAR incidence angle (35°) |
| C | Multi-disciplinary Phase | 14/04/1992 06:17:59 | 23/12/1993 10:56:47 | 3901 | 12749 | 35 days | 1-501 | AO; land and ice mapping; consistent set in regular intervals |
| D | 2nd Ice Phase | 23/12/1993 17:39:06 | 10/04/1994 15:58:38 | 12754 | 14300 | 3 days | 1-43 | see Phase B |
| E | Geodetic Phase | 10/04/1994 17:39:05 | 28/09/1994 00:50:18 | 14302 | 16745 | 168 days | 1-2411 | see Phase F |
| F | Shifted Geodetic Phase | 28/09/1994 02:30:56 | 21/03/1995 09:01:33 | 16747 | 19246 | 168 days | 1-2411 | 8 km shift vs. Phase E for denser grid |
| G | 2nd Multi-disciplinary | 21/03/1995 09:01:49 | 02/06/1996 22:29:29 | 19248 | 25539 | 35 days | 1-501 | see Phase C |
| ERS-1 / ERS-2 Tandem | 17/08/1995 00:56:04 | 02/06/1996 22:29:29 | 21376 | 25539 | 35 days | 1-501 | Interferometry and mapping | |
| ERS-1--> Back-up for ERS-2 | 02/06/1996 22:29:29 | 11/03/2000 00:33:04 | 25540 | 45251 | 35 days | 1-501 |
| Phase | Phase Name | Phase Start | Phase Stop | Start Orbit | Stop Orbit | Repeat Cycle | Track Range | SAR Mission Objectives |
|---|---|---|---|---|---|---|---|---|
| Launch | 21/04/1995 | |||||||
| Payload switch-on and verification | 21/04/1995 | |||||||
| A | Commissioning | 02/05/1995 05:52:00 | 17/08/1995 01:27:41 | 160 | 1688 | 35 days | 1-501 | SAR Commissioning |
| A | Tandem | 17/08/1995 01:27:41 | 02/06/1996 23:01:06 | 1689 | 5852 | 35 days | 1-501 | Interferometry and Mapping |
| A | Multi-disciplinary / LBR recorder | 17/08/1995 01:27:41 | 22/06/2003 12:31:22 | 1689 | 42721 | 35 days | 1-501 | AO; land and ice mapping; consistent set in regular intervals |
| A | Multi-disciplinary / No LBR Recorder | 22/06/2003 12:31:22 | 22/02/2011 14:15:07 | 42722 | 82929 | 35 days | 1-501 | AO; land and ice mapping; consistent set in regular intervals |
| B | Ice/3-day | 10/03/2011 22:35:12 | 04/07/2011 11:29:19 | 83064 | 84720 | 3 days | 1-43 | Ice and Pollution |
Ground Segment
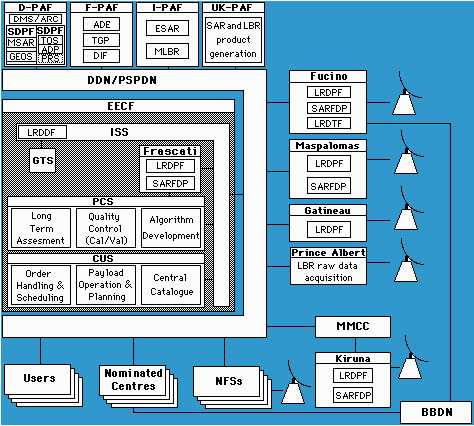
The ERS programme was designed to serve a large variety of users with a comprehensive range of products and services. In response to this and other very challenging mission objectives the ERS ground segment was established using a systems approach. The ground segment consisted of an ensemble of facilities responsible for the acquisition, processing, distribution and archiving of the satellite data and of the derived products.
Several factors influenced the design of the ERS ground segment:
- The roles of the ESA establishments
- The technical constraints of the satellite on data acquisition
- Specific user requirements for fast delivery services
- National expertise in particular scientific fields
- The desire to provide a primary user gateway to the system
- The need for a high level of automation in routine operations
The responsibilities of the ESA facilities influenced, to some extent, the distribution of the various tasks. The user interface and exploitation of the payload data was implemented at ESRIN in Frascati, Italy by the Earthnet Programme Office (EPO); while the satellite planning and control functions, including the control of the Kiruna station were under the responsibility of ESOC in Darmstadt, Germany.
The characteristics of the ERS space segment in terms of its multi-sensor payload, orbit configurations and power requirements imposed the implementation of a network of ground stations around the world to acquire the high bit rate SAR data (for which only direct readout was possible). In addition, facilities had to be provided to permit the downloading, once per orbit, of the on-board recorded low bit rate (LBR) data.
User requirements called for the implementation of specific processing tools and fast delivery services at the ground stations operated by and for ESA in order to allow selected data products to be made available quickly.
An important feature of the ground segment concept was that various user interfaces were considered key components. In practice, the Central User Service (CUS) of the Earthnet ERS Central Facility (EECF) constituted the primary user gateway to the system.
Products were disseminated either via fast delivery of selected products to nationally nominated user centres for operational applications or by offline delivery to individual end users from the Processing and Archiving Facilities (PAFs).
Data Acquisition and Fast Delivery Product Processing
ERS' orbit and the need for direct read-out of the SAR telemetry necessitated a global network of ground stations, either within the ESA network or made available by national (ESA member) or foreign (non ESA members) entities. The ESA network, which was established to ensure the acquisition of global LBR data and regional SAR data over Europe, consisted of:
- Kiruna (Sweden)
- Fucino (Italy) / Matera (Italy) from 2001
- Maspalomas (Canary Islands, Spain)
- Tromsø (Norway)
- Gatineau (Canada)
- Prince Albert (Canada)
The primary functions of the ESA ground stations were:
- Real-time data acquisition - when the satellites were visible from a ground station - the SAR data was transmitted at a rate of 105 Mbit/second on a carrier at 8140 MHz and the LBR data at a rate of 1093 Kbit/second (after spectrum spreading) on a carrier at 8040 MHz
- Acquisition of LBR data from the on-board tape recorder - the data was played back at a rate of 15 Mbit/second and transmitted to the ground at 8040 MHz
- Data processing and generation of fast delivery products - a number of standard products within three hours of satellite acquisition for distribution to primary user centres
- It should be noted that LBR data could be recorded on-board, while previously recorded data was being replayed. Therefore, during this period the LBR data was directly transferred. The instrument data was sent to the PAFs for archiving and off-line product generation - the SAR data and FD (Fast Delivery) products directly, the LBR data via Fucino/Matera, where they were transcribed onto optical disks.
Data Dissemination Facilities
ERS data was disseminated via various facilities at transmission and reception sites within the ground segment using satellite and telecommunication links. The low-rate fast-delivery products (LBRFDP) generated by the ESA ground stations were centralised at the EECF/ISS (Interface SubSystem) and re-distributed to nationally nominated user centres via standard landlines. An alternative of using a satellite link at low rate, e.g. 64 kbits/s, for quick dissemination, at least in Europe, was also considered. One of the ERS-1 mission objectives was to provide to the user community fast delivery (FD) products from ERS-1 within three hours from instrument observation. The nominal solution for the distribution of FD products distribution system was using public network landlines. However, for the distribution of SAR products, the capacity of the landlines was insufficient and satellite links were deemed necessary.
The Broadband Data Dissemination Network (BDDN) system was designed to transmit high rate FD products (HBRFDP) from Fucino/Matera, Kiruna and Maspalomas ground stations to nominated receiving stations by means of a satellite telecommunication channel. Sources outside the footprint of the satellite first transferred data to a suitable site within the footprint by appropriate point-to-point connections e.g. land lines, packet switching networks etc. The Gatineau ground station received data through the dedicated line between the EECF and Canada. The EECF was connected with the other ESA Ground Stations and appropriate user centres via low speed landlines or equipment connections. Both Kiruna and Fucino/Matera ground stations were equipped with a SAR FD processor and with monitoring and control sub-systems for FD products distribution. In addition, the stations were connected through standard low speed lines with the EECF for schedule and control purposes.
Processing and Archiving
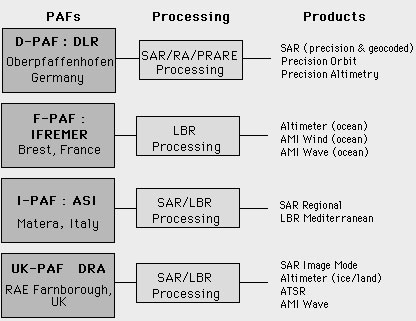
As described above there were four Processing and Archiving Facilities (PAFs):
The functions of the PAFs were harmonised by ESA and each had an agreed area of responsibility for archiving and product generation. They were responsible for:
- Long-term archiving and retrieval of ERS raw data, auxiliary information and relevant surface data
- Generation and distribution of offline geophysical and precision products
- Support to long-term sensor performance assessment, calibration and geophysical validation, demonstration campaigns and pilot projects
- Interface with the EECF for updating of the catalogue and supporting user services
The PAFs shared the responsibility for product generation in order to make efficient use of national expertise.
All PAFs were phased-out in 2016-2017 after repatriation of all the data to ESA-ESRIN. ERS-1/2 data has since been available to users online via the ESA EO data access service.
A summary of the offline products generated by each of the PAFs is shown in the figure and the services offered by each PAF are listed.
D-PAF
- Primary archive of raw data acquired by the German Antarctic Research Station at O'Higgins
- Primary processing centre for SAR precision and geocoded image data, higher-level altimetry products and precision orbit calculations
F-PAF
- Primary archive for LBR data (SAR wave mode, Wind Scatterometer and Radar Altimeter) data over the oceans and associated FD products
- Secondary archive of the global ATSR data set
- Primary processing centre for LBR data over oceans
- Secondary processing centre for ATSR data
- Storage of relevant ESA provided campaign data
I-PAF
- Regional archive of SAR and LBR data (raw, processed and FD) acquired over the Mediterranean by the Fucino station
- Regional processing of SAR and LBR products of the Mediterranean
UK-PAF
- Primary archive for raw and processed SAR and ATSR data, LBR data over ice and land and SAR FD products
- Secondary archive for global LBR dataset
- Primary processing centre for SAR and LBR data over ice and land
- Secondary processing centre for wave data products
- Storage of campaign data
The End of the ERS-1 Mission
Designed with a three-year lifespan, the ERS-1 satellite was operational for nine years, until on 10 March 2000 the satellite experienced an on board attitude control system failure. The satellite completed 45,000 orbits since its launch on 17 July 1991, and acquired more than 1.5 million individual SAR scenes.
The data was distributed to a worldwide community of users to serve a wide range of applications. Surface winds derived from the scatterometer and altimeter were supplied to meteorological services worldwide. The duration of the mission also allowed scientists to observe several El Nino phenomena through combined observations of surface currents, topography, temperatures and winds. The measurements of sea surface temperatures, critical to the understanding of climate change, made by the ERS-1 Along-Track Scanning Radiometer (ATSR) were the most accurate ever made from space at the time.
One of the achievements of ERS-1 was in the field of SAR interferometry, where for the first time precise topographic information were routinely produced from space data. The tandem operations of the two ERS satellites demonstrated this technique for various applications and paved the way for the definition of new dedicated SAR interferometry missions.
Data continuity for ERS-1 was provided by its successor, ERS-2.
The End of the ERS-2 Mission
ERS-2 was designed to operate for three years, but as its predecessor ERS-1 had done, the satellite greatly exceeded its design lifetime.
In 2011, after 16 years of operations, the satellite was still functioning nominally. The satellite was, however, running low on fuel, and the mission team decided in July to use the remainder to safely alter ERS-2's orbit in order to begin re-entry. This process was expected to take 15 years, during which the satellite would slowly descend and burn up in the atmosphere.
The final command issued to ERS-2 was sent at 13:16 UTC on 5 September, which was to deactivate the instruments on board.
ERS-2 completed 85,000 orbits and travelled 3.5 billion km from 1995 to 2011. Together with ERS-1, the two satellites provided a large dataset of long-term observations that supported a range of applications.
The Envisat mission provided data continuity for the ERS missions until 2012. From 2014 onwards, the Copernicus Sentinel missions are continuing ERS' original goal of environmental monitoring from space.
Read more about the end of the ERS-2 mission in this related news.