VFM
About VFM
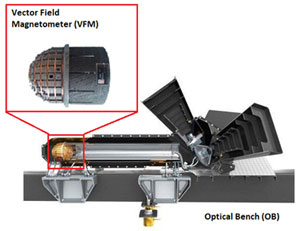
The Vector Field Magnetometer (VFM) is Swarm's core instrument. It makes high-precision measurements of the magnitude and direction of the magnetic field, i.e. the field's vector.
The VFM uses the proven fluxgate magnetometer design. VFM features a wide-range, high performance ring core fluxgate magnetometer. The fluxgate sensor uses the nonlinearity of magnetisation properties for the high permeability of easily saturated ferromagnetic alloys to serve as an indicator for the local field strength.
Data Tools
find out more
find out more
find out more
find out more
VFM Quality Control Reports
Swarm Quality Control Reports are produced on a weekly basis and and cover the quality and the data acquired by the three Swarm satellites and the products produced from this data.