ASM
About ASM
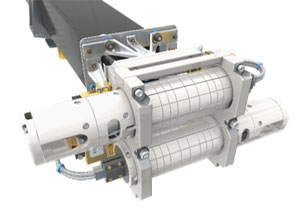
The Absolute Scalar Magnetometer (ASM) carried aboard the Swarm satellites measures the strength of the magnetic field to greater accuracy than any other magnetometer. It provides scalar measurements of the magnetic field to calibrate the Vector Field Magnetometer (VFM).
The instrument was developed by the French Space Agency (CNES) and the French Atomic Energy Commission.
Data Tools
find out more
find out more
find out more
find out more
ASM Quality Control Reports
Swarm Quality Control Reports are produced on a weekly basis and and cover the quality and the data acquired by the three Swarm satellites and the products produced from this data.