


Featured

About Swarm

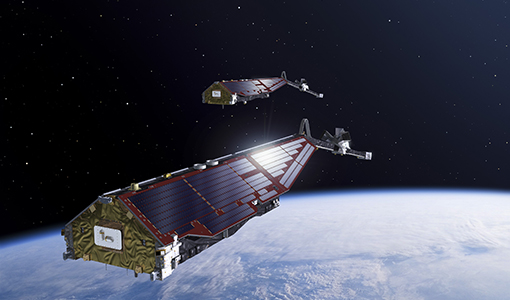
Swarm is ESA's first constellation mission for Earth Observation (EO). The mission consists of three identical satellites named Alpha, Bravo, and Charlie (A, B and C); which were launched on 22 November 2013 into a near-polar orbit.
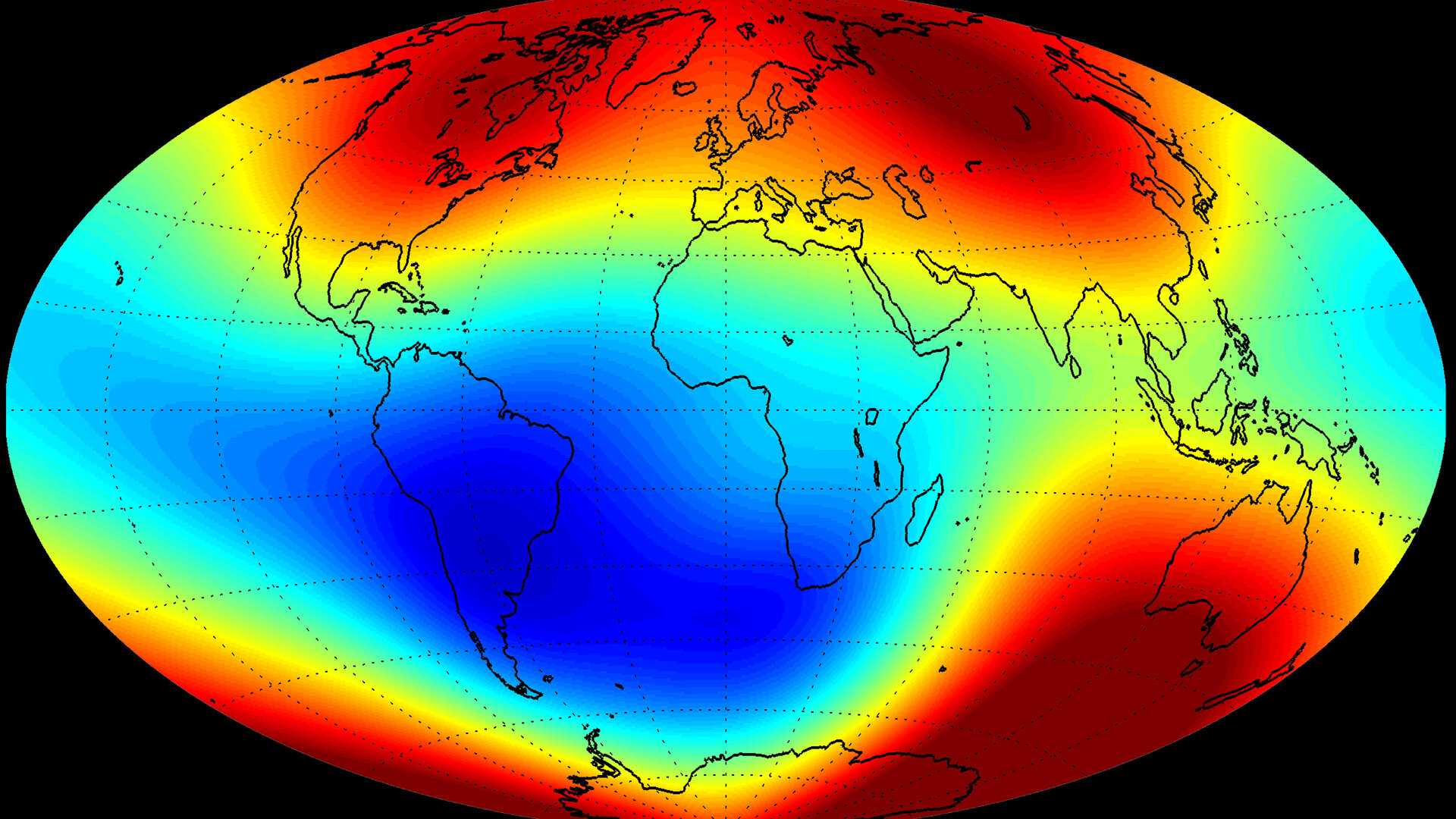
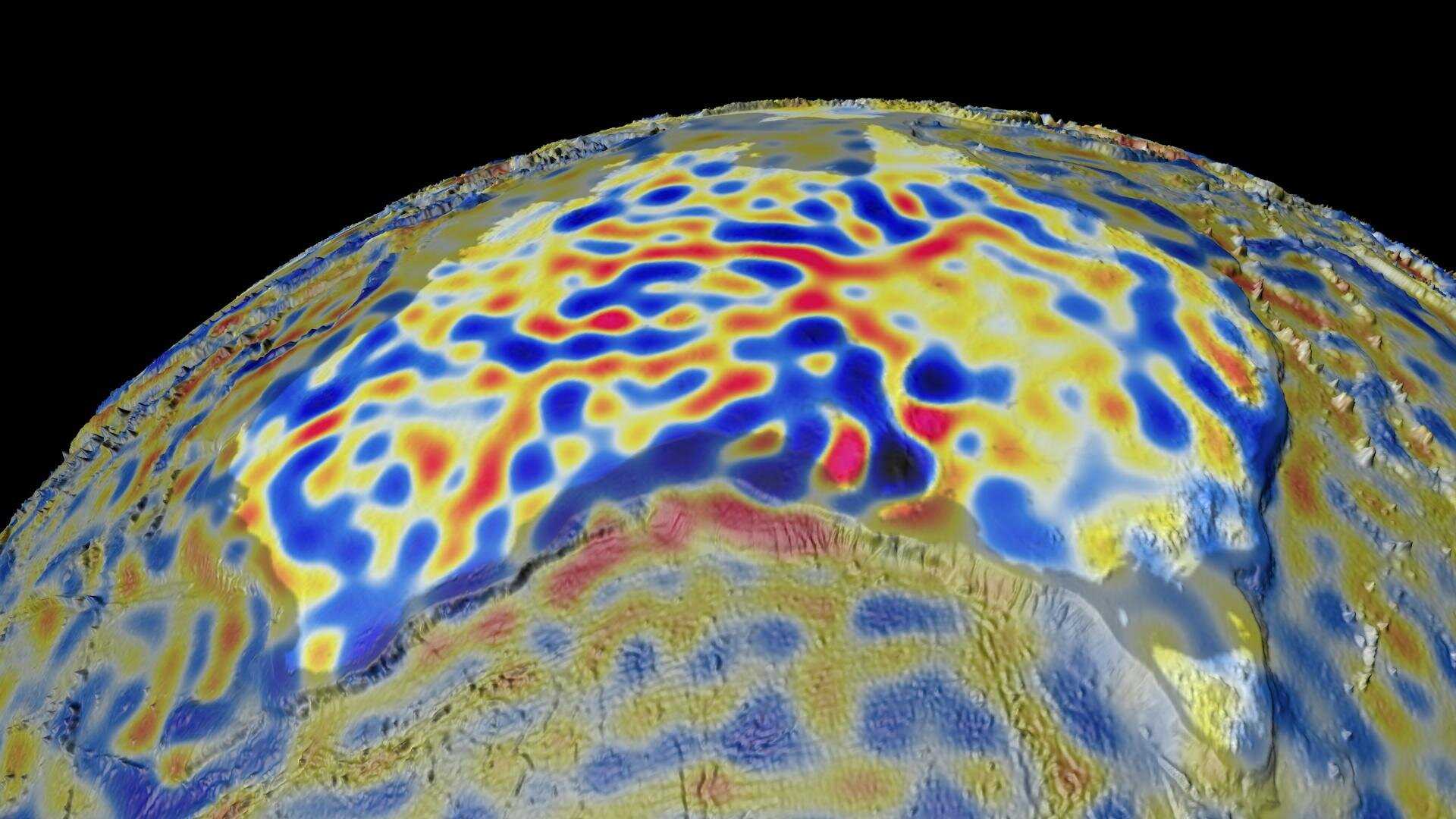
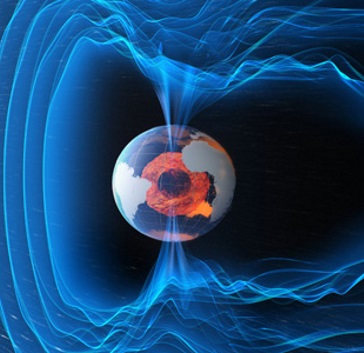
Swarm is dedicated to creating a highly detailed survey of Earth's geomagnetic field and its temporal evolution as well as the electric field in the atmosphere, by using a satellite constellation that carries sophisticated magnetometers and other instruments.
The initial constellation of the mission was achieved on 17 April 2014. Swarm A and C form the lower pair of satellites flying side-by-side (1.4° separation in longitude at the equator) at an altitude of 462 km (initial altitude) and at 87.35° inclination angle, whereas Swarm B is cruising at a higher orbit of 511 km (initial altitude) and at 87.75° inclination angle. Due to the subtle difference in altitude and inclination, the Swarm B orbit drifts slowly away from the Swarm A/C orbits at a rate of about 24°/year (difference in longitude of the ascending node). In October 2021, the orbital planes realigned, Swarm B counter-rotating with respect to Swarm A and C. To maximise the scientific return of this conjunction, the Swarm A and C satellites were brought back into the same orbital plane, starting with a manoeuvre in October 2019 that would slowly reduce the separation in longitude, achieving a perfect alignment at the exact time of the conjunction with Swarm B. During the conjunction, the distance between the Swarm A and C satellites was reduced to only 2 s along the orbit (15 km), which was previously kept between 4–10 s for safety reasons.
In March 2018, the CASSIOPE/e-POP mission was formally integrated into the Swarm constellation as the fourth element (Swarm-E) under ESA's Earthnet Third Party Mission Programme. The e-POP payload operations are currently focused on maximising the Swarm/e-POP scientific outcome, and there is an ongoing joint effort to develop new and better-calibrated products based on e-POP data.
Swarm was designed to operate for four years, following a three-month commissioning phase. In November 2017, the mission was granted a four-year extension to 2021. It was then extended further and will operate till 2025.
Swarm Objectives
The Swarm mission primary objectives are:
- Study of core dynamics, geodynamo processes and core-mantle interaction
- Mapping of lithospheric magnetisation and its geological interpretation
- Determination of the 3D electrical conductivity of the mantle
- Investigatigation of electric currents flowing in the magnetosphere and ionosphere.
The secondary objectives are:
- Identifying the ocean circulation by its magnetic signature
- Quantifying the magnetic forcing of the upper atmosphere.
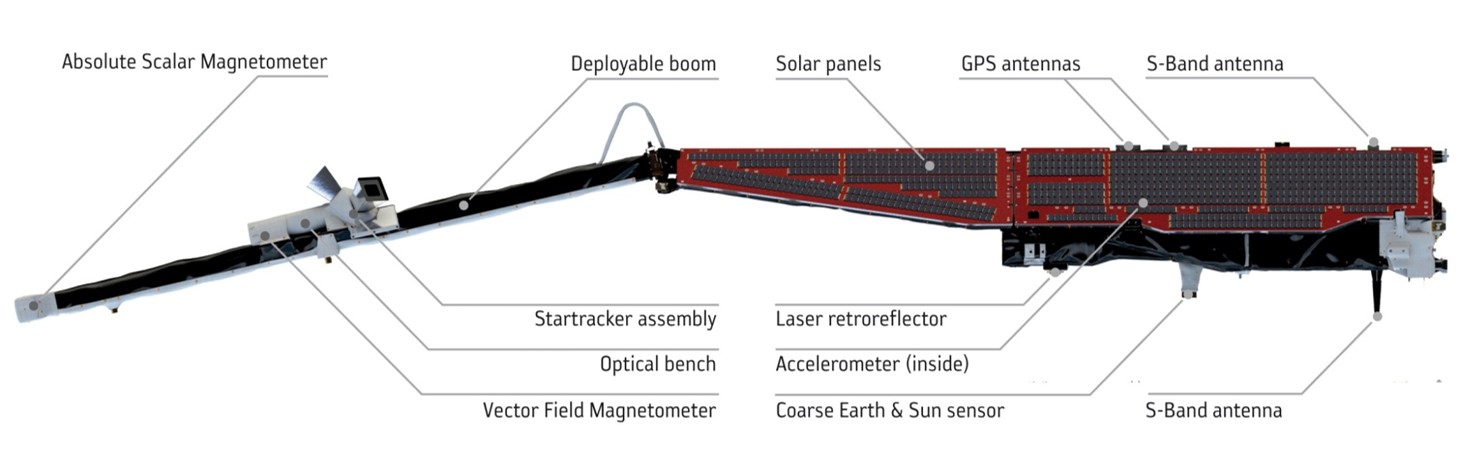
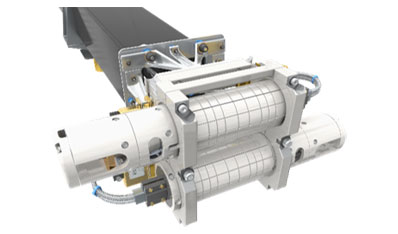
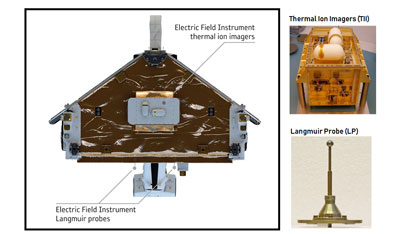
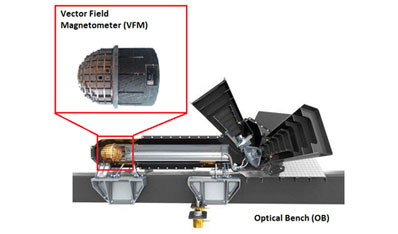
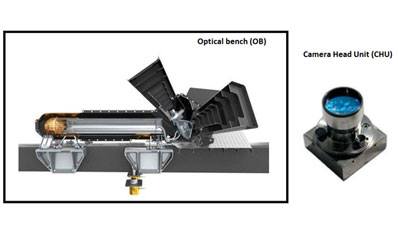
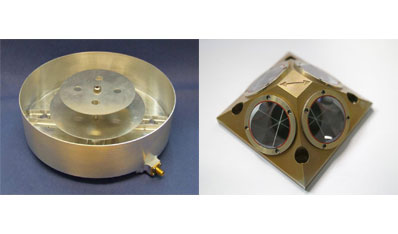
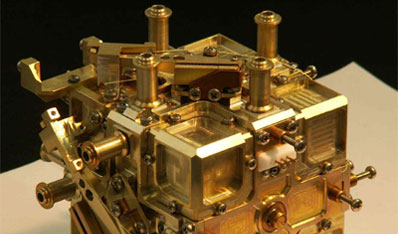
Swarm Instruments
find out more
find out more
find out more
find out more
find out more