- All Categories (217)
- Data (2)
- News (20)
- Missions (20)
- Events (17)
- Tools (2)
- Activities (8)
- Documents (148)
MISSIONS
Explore the European Space Agency's Earth Observation satellite missions. Learn all about ESA's dedicated Earth Explorers or collaborations with other agencies through the Third Party Missions programme.
Mission - Heritage Missions
SAR (ERS) Processor Releases
It should be noted that for SAR, each product ordered is processed directly from the raw data, using the current version
Mission - Heritage Missions

PALSAR
A small percentage of ALOS-1 PALSAR products processed by the current installed ESA IPF are affected by a known quality issue
Mission - Heritage Missions

PALSAR Processor Releases
The current ALOS-1 PALSAR IPF integrated within the ESA On-The-Fly system is v4.16p9, installed on 24 January 2017.
Mission - Heritage Missions
RA (ERS)
the RA provided information on significant wave height; surface wind speed; sea surface elevation, which relates to ocean currents
Mission - Heritage Missions
SAR (ERS)
Processor Releases It should be noted that for SAR, each product ordered is processed directly from the raw data, using the current
Mission - Heritage Missions
ERS Radar Course 1
Therefore, microwaves easily penetrate clouds, and images can be acquired independently of the current weather conditions
Mission - Heritage Missions
PALSAR Quality Control Reports
Find out more Quality Disclaimer A small percentage of ALOS-1 PALSAR products processed by the current installed ESA IPF
Mission - Heritage Missions
Wind Scatterometer (WS) Processor Releases
The current processor software version for the operational ground segment is ASPS v 10.04.
Mission - Heritage Missions
Wind Scatterometer (WS) Quality Control Reports
The data includes instrument working modes, temperatures, currents and voltages of the transmitter and calibration chain,
Mission - Third Party Missions

ALOS-1 Mission Objectives
Oceanography and coastal zone-related research (oil spill, high-resolution DEM) Coastal zones, sea surface wind, wave height, wave current
Mission - Heritage Missions
RA (ERS) Overview
demanding constraints and had the following major objectives: Precise altitude (ocean surface elevation for the study of ocean currents
Mission - Heritage Missions
PALSAR Products Information
The service currently provides access from ESA's archive to the following PALSAR L1 high-resolution data products.
Mission - Heritage Missions
Wind Scatterometer (WS) Cal/Val
ERS-2 Scatterometer: Mission Performances and Current Reprocessing Achievements Calibration strategy for ERS scatterometer
Mission - Heritage Missions
SAR (ERS) Interferometry
addition, components of the interferometric signal such as anomalous signal path lengths introduced by atmospheric effects are currently
Mission - Heritage Missions
RA (ERS) Products Information
data showed a clear improvement in terms of accuracy over the tandem periods between ERS-1, ERS-2 and Envisat missions (currently
Mission - Heritage Missions
SAR (ERS) Overview
Scientists are studying the radar backscatter from the ocean surface related to wind and current fronts, to eddies and to
Mission - Heritage Missions
ERS Radar Course 2
Therefore, microwaves easily penetrate clouds, and images can be acquired independently of the current weather conditions
Mission - Heritage Missions
ERS Radar Course 3
Therefore, microwaves easily penetrate clouds, and images can be acquired independently of the current weather conditions
Mission - Heritage Missions
ATSR Overview
Applications KuroShio current captured by ERS The ATSR onboard the ERS missions had several applications spanning the disciplines
Mission - Heritage Missions

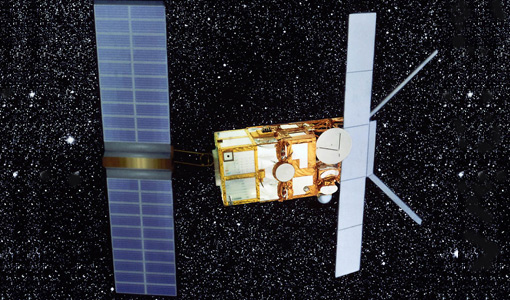
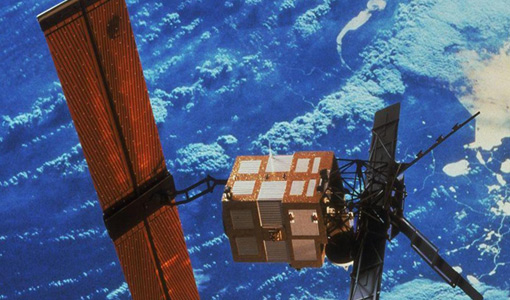
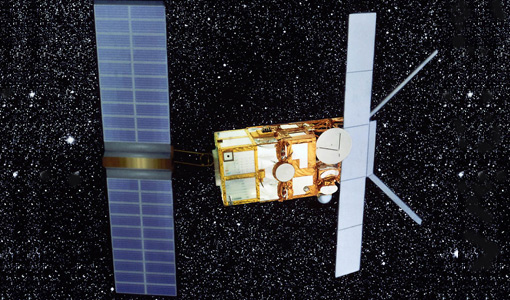
ERS Overview
global scale, the two ERS satellites expanded our understanding of the interaction between the oceans and atmosphere, ocean currents