- All Categories (4348)
- Data (1)
- News (4)
- Missions (13)
- Events (9)
- Activities (4)
- Documents (4317)
Mission - Heritage Missions
Wind Scatterometer (WS) Quality Control Reports
The data includes instrument working modes, temperatures, currents and voltages of the transmitter and calibration chain,
Mission - Heritage Missions
Wind Scatterometer (WS) Processor Releases
The current processor software version for the operational ground segment is ASPS v 10.04.
Mission - Heritage Missions
Wind Scatterometer (WS) Cal/Val
ERS-2 Scatterometer: Mission Performances and Current Reprocessing Achievements Calibration strategy for ERS scatterometer
Activity - Cal/Val activities
UV nadir viewing galleries
Download chart A new perspective on the current state of the ozone layer derived using the merged total ozone data record
News - Thematic area articles
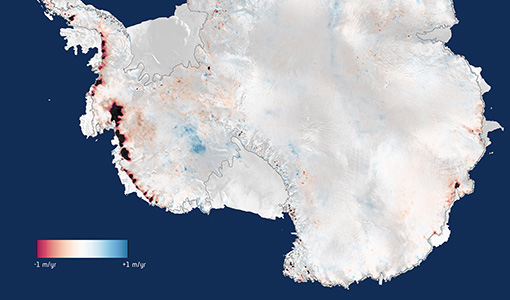
Transforming space data into climate action
By combining high-quality data from both current and previous missions, scientists are improving their understanding of the
News - Success Stories
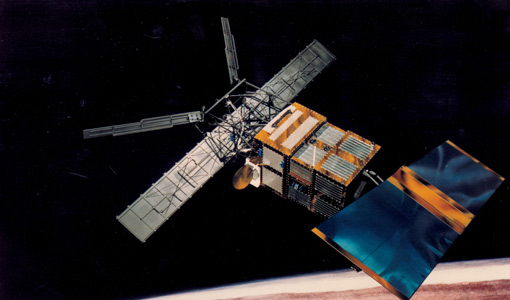
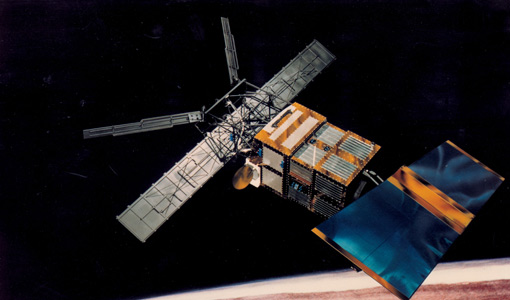
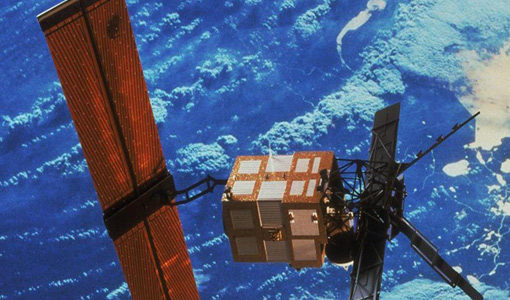
Trailblazing ERS-2 mission enables climate change applications
Varied elevations of Bachu in western China InSAR is currently one of the most accurate methods to generate digital elevation
Document - General Reference

The Global Ozone Monitoring Experiment (GOME)
This document reports on what can be expected from the improved GOME-2 instrument. In order to underpin the case, the achievements of the existing instrument, GOME-1, in terms of instrument performance, routinely generated data products, and scientific results achieved so far are first summarised, before extrapolating to the expected performances and capabilities of the enhanced version GOME-2 being built for METOP.
Activity - Quality
SCIRoCCo
Author: The SCIRoCCo Team Abstract: The ERS Scatterometers in the Global Climate Observing System report describes the current
Document - General Reference
SCI-RPT-15-0001-v6-EvolutionReport.pdf
The ERS Scatterometer evolution report provides the recommendations, for the exploitation and valorisation of ESA's legacy ERS-1 and ERS-2 scatterometer (hereafter ESCAT) data.
Document - General Reference
SCI-PUB-14-0002-v01-WMO-report-1.0.pdf
The ERS Scatterometers in the Global Climate Observing System report describes the current and anticipated relationship and
Document - Product Handbook

SCI-PUB-14-0001-v01-ScatHbk-6.pdf
The Scatterometry Handbook aims at providing, in a single publication, a knowledge base on Scatterometry data processing, and references to the relevant literature, needed to the users for exploiting the wealth of available scatterometer data, notably but not limited to those provided by ESA's ERS Missions.
Document - General Reference
SCI-PRE-2015-0001-v-01-SM-reprocessing-TUW.pdf
Soil Moisture reprocessing activities
Document - General Reference
SCI-PRE-2014-0003-v-01-SCAT Calibration approach-TUW.pdf
SCAT Calibration approach-TUW
Mission - Heritage Missions
SAR (ERS) Processor Releases
It should be noted that for SAR, each product ordered is processed directly from the raw data, using the current version
Mission - Heritage Missions
SAR (ERS) Overview
Scientists are studying the radar backscatter from the ocean surface related to wind and current fronts, to eddies and to
Mission - Heritage Missions
SAR (ERS) Interferometry
addition, components of the interferometric signal such as anomalous signal path lengths introduced by atmospheric effects are currently
Mission - Heritage Missions
SAR (ERS)
Processor Releases It should be noted that for SAR, each product ordered is processed directly from the raw data, using the current
Activity - Quality
REAPER
data shows a clear improvement in terms of accuracy over the tandem periods between ERS-1, ERS-2 and Envisat missions (currently