- PROBA-1
- Mission
- PROBA-1 Overview
PROBA-1 Overview
Mission Background
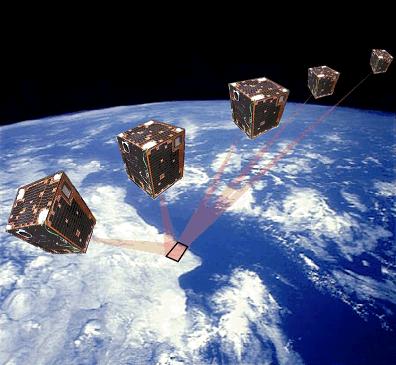
PROBA-1 rolled in its orbit to take images - the satellite's platform and payload worked as one - spinning reaction wheels guided by a star tracker rolled it up to 25º side to side and ±55º/±36º along its path. This helped PROBA-1 to compensate for its 7.5 km/s speed, like a photographer panning to snap a moving target. So each target was seen on up to five different angles (-55º, -36º, nadir view, +36º and +55º).
Users of the PROBA-1 satellite to date include:
- More than 60 Earth Observation Principal Investigators from scientific institutes within Europe
- Space weather and space debris scientific communities
- EduProba (Belgian schools and universities).
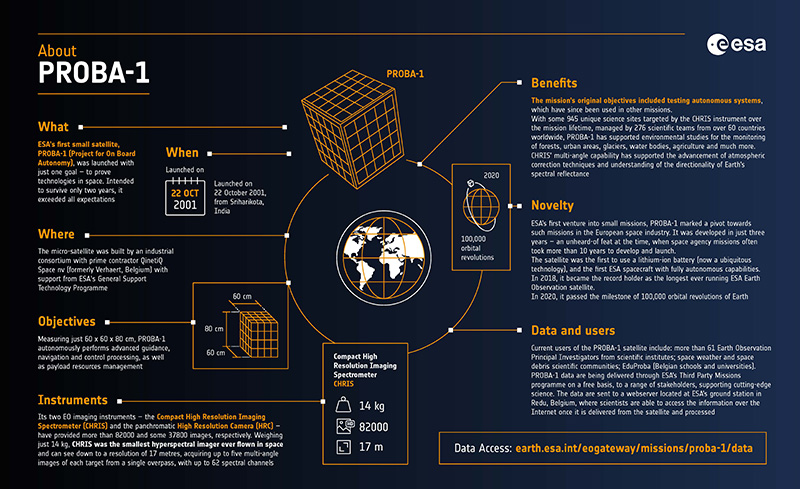
PROBA-1 was a technology demonstration mission that was funded within the framework of ESA's General Support Technology Programme. It is currently managed by ESA's Control and Data Systems Division within the Department of Electrical Engineering, which is part of the Directorate for Technical and Operational Support at ESA/ESTEC. In the future, it will continue to showcase innovations and serve as a foundation for upcoming missions.
It was the first ESA spacecraft with fully autonomous capabilities, meaning it was designed to perform virtually unaided, performing everyday tasks like navigation, payload and resource management with little involvement by staff at ESA's ground station in Redu, Belgium.
The innovative design and operating systems were the result of ESA's collaboration with prime contractor Verhaert Design and Development of Belgium, working alongside other European companies and universities. PROBA-1 has given engineers the opportunity to evaluate the advantages of autonomous spacecraft operation.
PROBA-1's payload was designed to be controlled by a computer system 50 times more powerful than its counterpart onboard ESA's full-size solar observing satellite, SOHO, allowing the micro-satellite to combine in-orbit technology demonstration, such as an onboard mission planning and onboard navigation and failure detection, with some useful monitoring of Earth's environment.
The instruments that were onboard included CHRIS (Compact High Resolution Imaging Spectrometer, from SIRA/UK), DEBIE (Debris In-Orbit Evaluator, from Patria Finnanvitec, Finland), and SREM (Standard Radiation Environment Monitor, from Contraves, Switzerland). PROBA-1 also carried two imagers: a Wide Angle Camera (WAC) and a High Resolution Camera (HRC) with a 10 metre resolution, both built by OIP of Belgium.
Cameras were used by students from selected Belgian schools whose experiment proposals were accepted under the EDUPROBA project.
Images of Earth and other data were gathered by PROBA-1 and sent to a web server located at the ESA ground station in Redu, Belgium, where scientists accessed the information over the Internet as soon as it was delivered from the satellite.
In the first three months after launch, Verhaert tested the satellite from the ground station in Redu. The satellite was subsequently handed over to ESA and the scientific user community. PROBA-1 was originally expected to operate for at least two years but this small satellite - less than 1 cubic metre in size - provided data from 22 October 2001 until the operational phase of the mission ended in December 2022.
Infographic
Learn about ESA's PROBA-1 (Project for On-Board Autonomy) mission in this infographic. PROBA-1 began as a technology demonstration satellite in 2000 and was originally expected to operate for at least two years. However, it successfully provided data from 22 October 2001 until the conclusion of its operational phase in December 2022.
Satellite Design
A high degree of spacecraft onboard autonomy, together with ground-station automation, considerably reduces the need for ground operations. PROBA-1 aimed to use and demonstrate automatic functions, both onboard and in the mission ground segment.
PROBA-1 onboard automatic functions included:
- Nominal operation and resource management
- Computation and control of camera pointing and scanning from raw inputs from users (target latitude, longitude and altitude)
- Payload operations scheduling and execution
- Data communications management.
The spacecraft mass was 94 kg, with 25 kg having been dedicated to scientific and Earth observation instruments, in addition to the technology demonstration payloads. The principal objective was the in-orbit evaluation of new spacecraft technologies. PROBA-1 had been intended as a flight opportunity for Earth observation instruments that could have benefited from the agile pointing capabilities and the autonomy features of the satellite.
The PROBA-1 onboard automatic functions included all payload operations' scheduling and execution, target fly-by prediction, and control of camera pointing and scanning from raw user inputs (target latitude, longitude, and altitude). The point and stare requirements of the High Resolution Camera (HRC), as well as the multiple image scan requirement to support Bi-directional Reflectance Distribution Function (BRDF) measurements with the Compact High Resolution Imaging Spectrometer (CHRIS) were satisfied with the specified accuracy, by this small and agile gyro-less platform, whose attitude determination was based on autonomous star tracker only.
The main Earth imaging payload, CHRIS, weighing only 14 kg, was used to measure directional spectral reflectance. The instrument was capable of imaging up to 200 spectral bands simultaneously at full resolution with a spatial resolution of 20m at nadir and swath width of 15 km. The HRC was a black and white camera with a miniaturised Cassegrain telescope providing 5m geometrical resolution images. Each image covered a ground area of approximately 4 km by 4 km. The pointing agility of the spacecraft allowed both cameras to take multiple images of the same target area at different viewing angles on the same orbital pass.
PROBA-1 was compatible with the Ariane ASAP5 and PSLV launcher requirements. Its structure was built using aluminium honeycomb panels. Body-mounted solar panels provided power to the spacecraft, and a Li-Ion battery was used for energy storage. A centrally switched regulated bus distributed the power to the units and instruments.
An ERC32 (SPARC) based computer provided the computing power for all the platform functions, while a TSC21020 (DSP) provided the processing power to the imaging payload. All software components, either in the central computer or embedded in the spacecraft units could be reprogrammed in flight. The S-band telecommunications subsystem was omnidirectional and CCSDS-compatible. The set of ACNS units supported Earth and inertial 3-axis attitude pointing as well as on-board navigation and maneuvering computations. The thermal control of the spacecraft was completely passive. The table below summarises the characteristics of the spacecraft.
Mission Operations
The main elements of the ground segment were: a fully steerable S-band antenna of 2.4 m, a baseband equipment, a control system based on the ESA SCOS II system (used also during the ground test and integration phase), a planning system and a data server. A unique script language allowed an interface with the telemetry and the telecommand server of the control system and to control all the pass activities from the preparation to the post-processing phase and most of the ground segment units.
A key element of the automation of the ground segment tasks, progressively put in place along the mission, was that they allowed automatic email generation in case of any warning messages. It was completed by the automated pass template tool which scheduled the pass activities and provided a graphical interface of the activities statuses.
The PROBA-1 development approach includesd several innovative aspects. A design-to-cost approach was adopted according to European Cooperation for Space Standardisation category 3 project classification. This involved using COTS (commercial off-the-shelf) equipment and units; simulation-based development, verification and testing; automated software generation; extensive use of test and operations infrastructure commonalities; and a highly integrated ESA-industry design and development team. The NORAD Two Lines Elements (TLEs), automatically retrieved from the internet, are used to predict with the COTS software, the ground station visibilities. The antenna pointing angles were also derived from the TLEs.
PROBA-1 ground-segment automatic functions included:
- Spacecraft pass operations
- Spacecraft performance evaluation
- High-level user requests to spacecraft via Internet.
Related Links
Learn more about PROBA-1 from these websites:
- PROBA-1 on ESA's Website
- PROBA-1 on the eoPortal (The information provided is sourced and updated by external entities. For further details, please consult our Terms and Conditions page.)