- All Categories (484)
- News (11)
- Missions (11)
- Events (12)
- Activities (1)
- Documents (449)
Document - Proceedings

Emerging-Scatterometer-Applications-from-Research-to-Operations.pdf
The objective of the Workshop, held on 5-7 October 1998 at ESA-ESTEC (Noordwijk, The Netherlands), was to review the current
Document - Proceedings
3rd International Symposium on Retrieval of Bio and Geophysical Parameters from SAR Data for Land Applications
This Symposium provided a snapshot of where we currently stand in exploiting SAR data to understand geophysical and biophysical
Event - Workshop

IDEAS+ Cal/Val Workshop 7
Regular workshops are held every nine months with the whole IDEAS+ Task 3-Cal/Val team in order to review the status of current
Event - Workshop
SEASAR 2012
Aouf 14:00 - 14:20 Towards consistent inversion of wind, waves and surface current from SAR Bertrand Chapron (IFREMER, France
Activity - Quality
SCIRoCCo
Author: The SCIRoCCo Team Abstract: The ERS Scatterometers in the Global Climate Observing System report describes the current
Mission - Earth Explorers
SMOS product availability
+ NIR + Long LO + FTT LO + Electrical Stability LO + NIR + Long + FTT LO + Short LO + Long + Short Current
Event - Training

EO Summer School 4
Keynote lectures on global change issues are also given to discuss the current state of the science of global change and
News - General News
ESA's excellent Earth Explorer missions extended to 2025
Acting like the spinning conductor in a bicycle dynamo, it generates electrical currents and thus the continuously changing
Event - Workshop
SEASAR 2006
requirements Formulate recommendations for algorithm and new products development To present ESA studies results on wind, wave and currents
News - Operational News

SMOS data outage since 22 February 2024
spacecraft has been back in nominal mode since 25 February and on 27 February, the MIRAS instrument was switched on and is currently
Event - Training
EO Summer School 3
In line with observations it shows anti-cyclonically rotating surface currents and cyclonically rotating bottom currents.
Event - Training
EO Summer School 5
Keynote lectures on global change issues are also given to discuss the current state of the science of global change and
Mission - Earth Explorers
SMOS Objectives
SMOS Science The SMOS mission is a direct response to the current lack of global observations of soil moisture and ocean
Document - General Reference

Taking-the-Measure-of-Earth-Fifteen-Years-of-Progress-in-Radar-Altimetry.pdf
This article is extracted from ESA Bulletin Nr. 128.
Mission - Heritage Missions
RA (ERS)
the RA provided information on significant wave height; surface wind speed; sea surface elevation, which relates to ocean currents
News - Data Release news
New reprocessing of datasets celebrates 30 years of ERS
For each surface, the experts will use our current knowledge acquired over 30 years of experience, to improve the ERS altimetric
News - Data Release news
New version of the SMOS-CryoSat level 4 sea ice thickness product is now available
The current version 205 replaces the previous baseline version 204.
News - Thematic area articles
Satellite data central to ocean monitoring
microwave monitoring instruments, optical imagers, and infrared radiometers, which can map ocean variables related to ocean currents
Event - Workshop
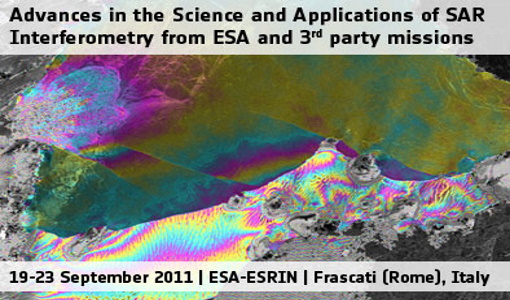
Fringe 2011 Workshop
The Fringe series of workshops started in 1992 and they are currently organised by ESA every two years.