- Learn & Discover
- Drone-based Laser Scanning of ...
Drone-based Laser Scanning of Tropical Forests for Biomass Cal/Val
13 Apr 2021
ESA’s upcoming Biomass mission will deliver valuable P-band SAR data aimed at forest aboveground biomass (AGB) estimation across the humid tropics. Additionally, the current GEDI mission on the International Space Station (LiDAR), the SAOCOM, NISAR, ALOS-4, and Tandem-L missions (L-band SAR) will widen our possibilities to estimate AGB from space. However, all these missions rely on calibration and validation data derived from field-plots. These data need to be accurate and independent of tree size. Field methods that create these data need to be scalable across the typically hectare-scale satellite sensor footprints.
Terrestrial Laser Scanning (TLS) has shown very good AGB estimation capabilities for individual trees. However, TLS is time-consuming in the field, typically requiring three to six days per hectare of tropical forest. Recently, Unmanned Aerial Vehicle-based Laser Scanning (UAV-LS) has been tested in temperate forests for explicit geometric tree modelling (Brede et al., 2019). With UAV-LS, several flights can be conducted per day covering several hectares of forest or revisiting the same plot to increase point density. This effectively allows to collect data at the satellite-footprint scale in less than a day and support the acquisition of a globally representative, systematically collected reference system for biomass product validation as required for the CEOS Good Practices Guideline (Duncanson et al., 2021, DOI:10.5067/doc/ceoswgcv/lpv/agb.001).
Within the ESA-funded IDEAS-QA4EO project, a team of scientists from Wageningen University and Research (Netherlands) undertook a five-week campaign in October 2019to test the opportunities with these new technologies in a tropical forest environment. The campaign took place at the Paracou Research Station in French Guiana (France) in a moist, lowland tropical forest. The campaign was supported by UAV pilot Nicolas Barbier (AMAP Lab, IRD, CIRAD, CNRS, INRA, Montpellier, France) and logistic support was provided by site Principal Investigator Géraldine Derroire.

Landing the UAV-LS (RIEGL RiCopter with VUX-1UAV)
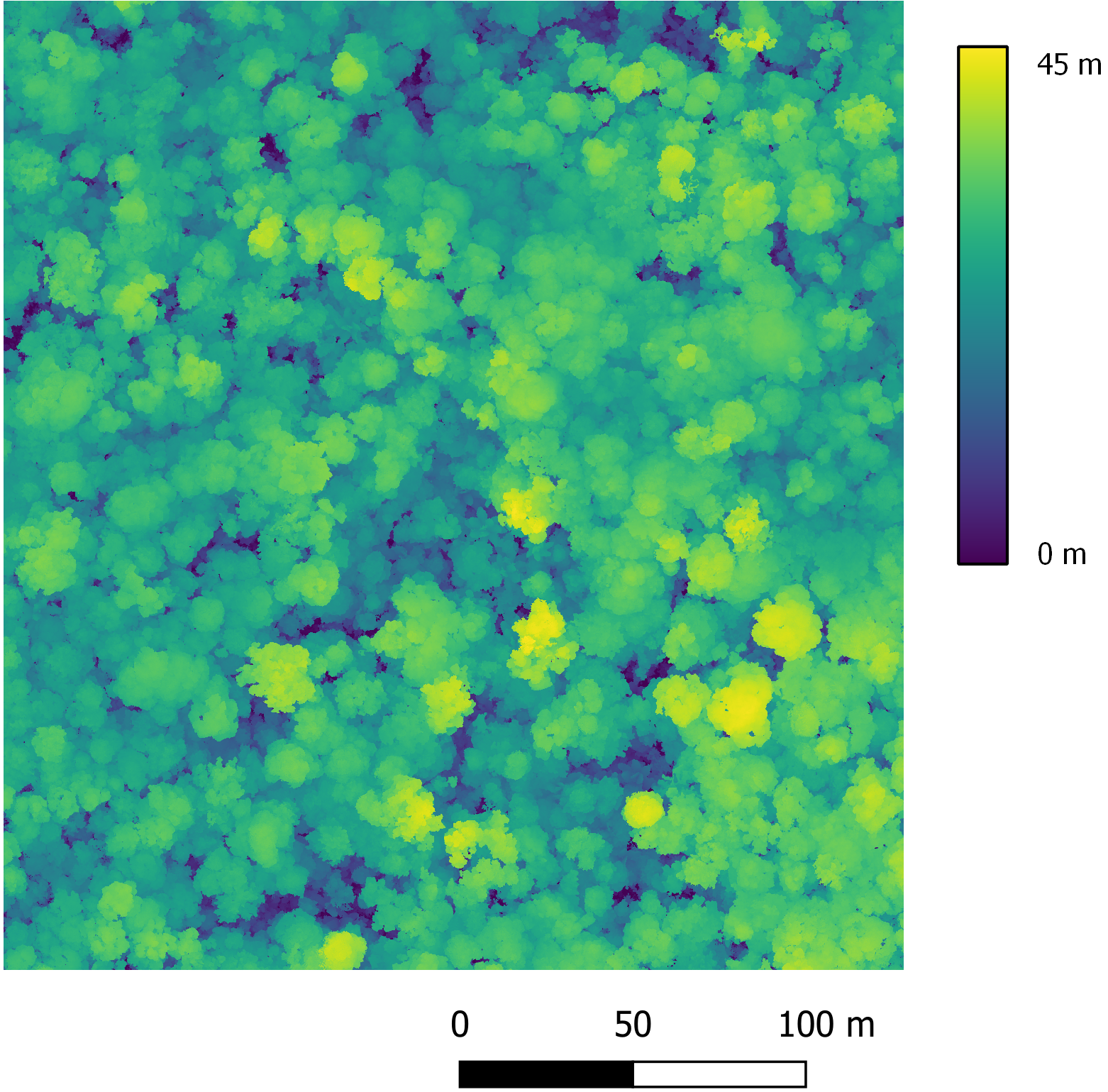
The field sampling focused on a four ha sub-plot of Paracou plot six and included five days of UAV-LS flights as well as four weeks of TLS data collection in the forest. In total, 8 UAV-LS flights have been successfully completed and 914 TLS scan positions visited to scan the forest canopy from above and below. The trusted RIEGL high-end VUX-1UAV (UAV-LS) and VZ-400 (TLS) systems were used to complete the job. The campaign delivered a unique dataset with co-registered UAV-LS and TLS point clouds. The UAV-LS point cloud features a density of up to 48,600 points per m2.
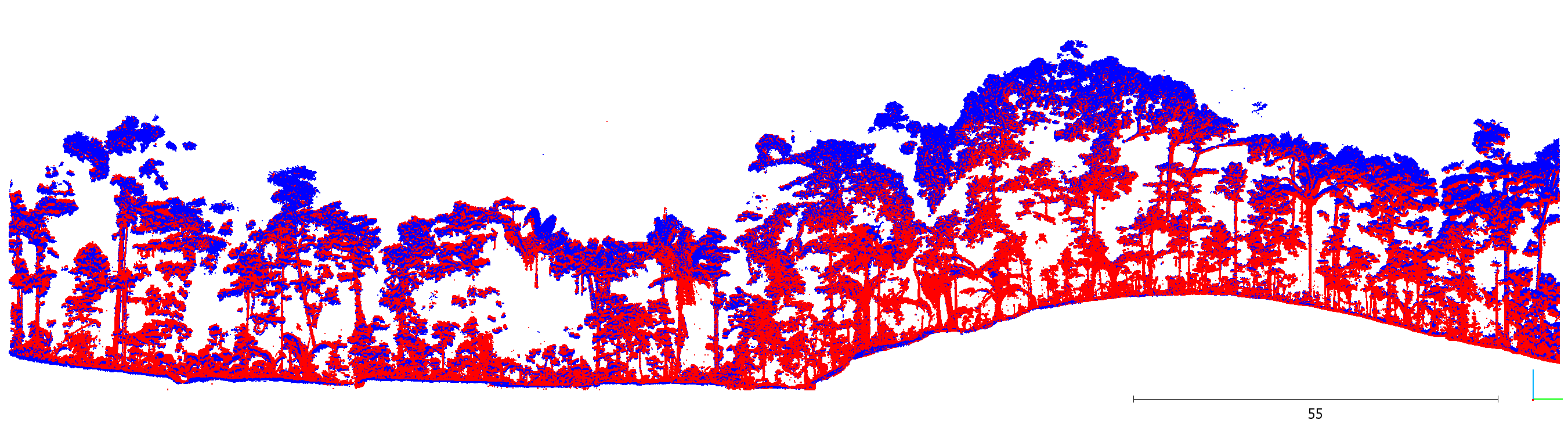
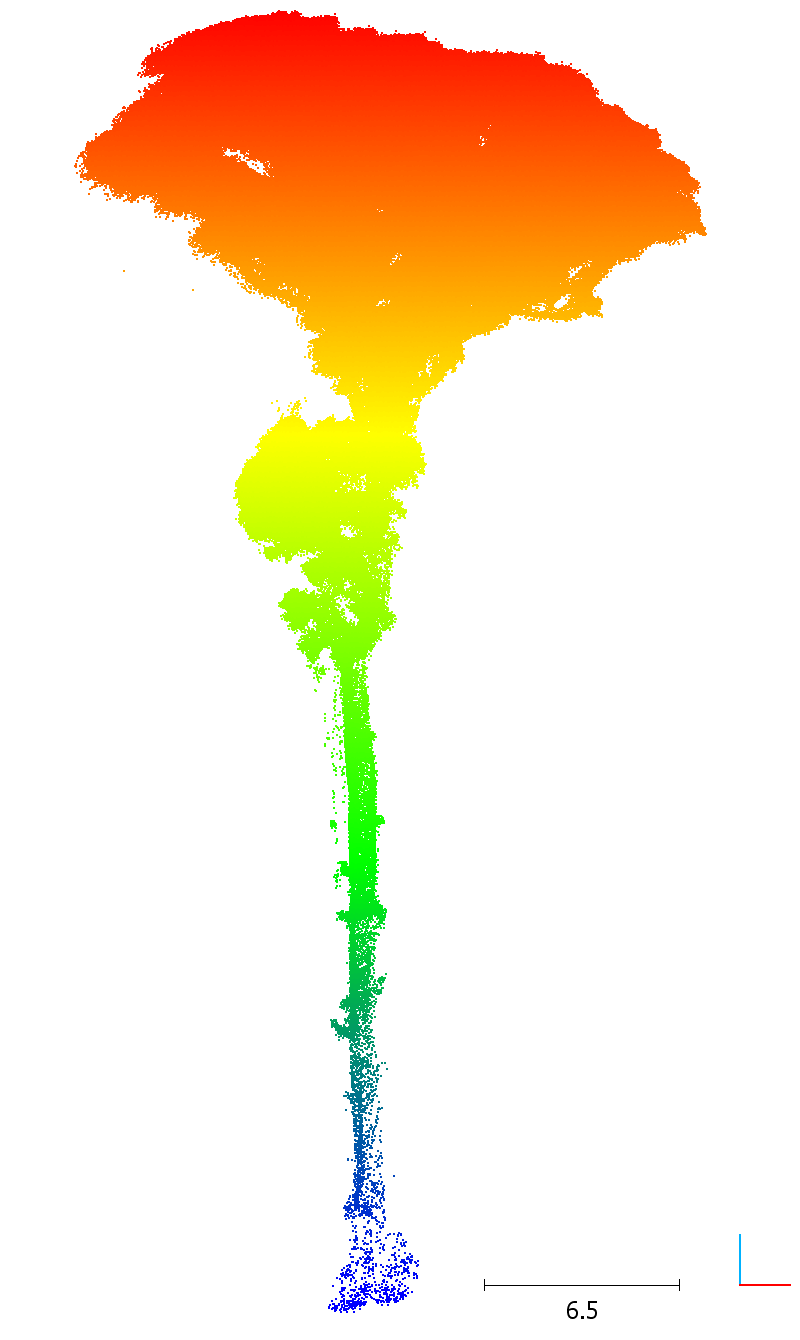
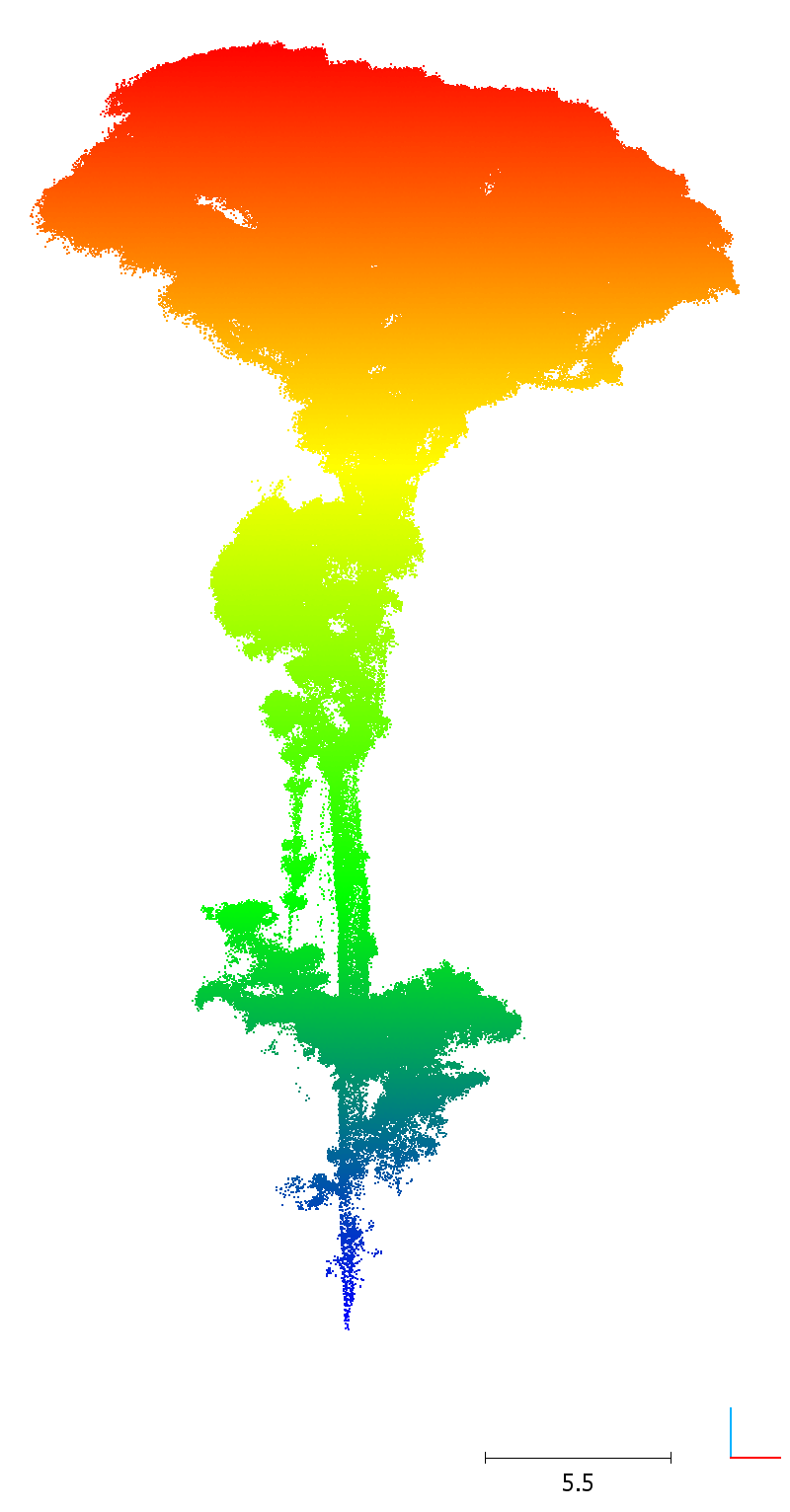
Initial investigation using existing tree segmentation algorithms developed for manned Airborne Laser Scanning (ALS) data were only moderately successful and a new tailor-made individual tree segmentation method specifically for UAV-LS is now being developed and tested with this unique dataset. These are based on a graph representation of the forest and shortest path calculations on these graphs (Raumonen et al, 2021). First results will be presented at IGARSS 2021 in Brussels (Session: “UAV for mapping and monitoring of forest ecosystems”). These developments will be important when estimating individual tree AGB and comparing it to state-of-the-art modelling techniques based on TLS. The exploration of AGB estimation from UAV-LS is currently under investigation.

References
Brede, B., Calders, K., Lau, A., Raumonen, P., Bartholomeus, H.M., Herold, M., Kooistra, L., 2019. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 233, 111355.
Raumonen, P., Brede, B., Lau, A., Bartholomeus, H., 2021: A Shortest Path Based Tree Isolation Method for UAV LiDAR Data. IGARSS 2021 International Geoscience and Remote Sensing Symposium, July 12-16, Brussels.