STR (Swarm)
About STR
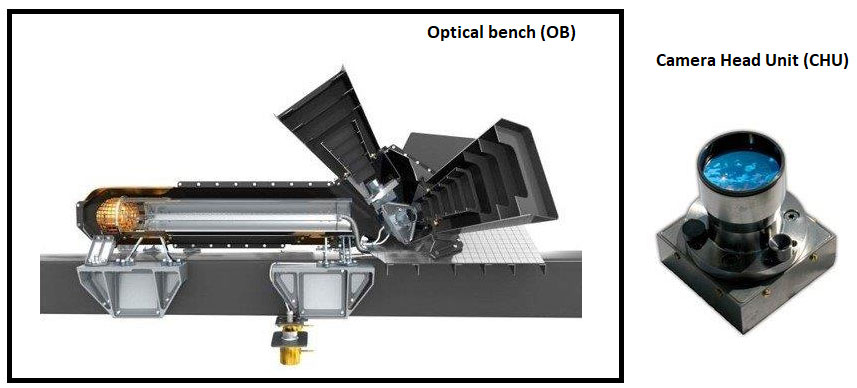
The Star Tracker (STR) on the Swarm satellites is comprised of three Camera Head Units (CHUs) mounted on the innermost end of the optical bench. It retrieves information on the precise satellite orientation and attitude in space. Nominally, the attitudes of all three heads are provided simultaneously at 2 Hz rate, however one head is regularly blinded by the Sun leaving the attitudes of just two heads. The attitudes of the 2-3 CHU are combined into one attitude, the attitude of the STR Common Reference Frame (CRF).
Data Tools
find out more
find out more
find out more
find out more
STR Quality Control Reports
Swarm Quality Control Reports are produced on a weekly basis and and cover the quality and the data acquired by the three Swarm satellites and the products produced from this data.